機械設備自動與智慧化的挑戰

圖1 : 工研院機械所智慧機器人組組長黃甦。(source:工研院機械所)
機械設備自動化與智慧化的關鍵技術是運動控制,想讓運動控制更智慧化,有賴同步運動控制技術、I/O平台整合、控制器等各環節相互配合。從機械手臂及智慧機器人的發展最容易看出運動控制智慧化的具體成果。
從工業1.0蒸汽動力驅動機器取代人力,工業2.0以電力驅動機器取代蒸汽動力,到工業3.0 PLC和PC自動化操控機器取代人力,機器開始變聰明,再到工業4.0、AI智慧大數據、物聯網快速崛起,機械設備自動化與智慧化需求更勝以往,而機械設備自動化與智慧化的關鍵技術是運動控制,想讓運動控制更智慧化,有賴同步運動控制技術、I/O平台整合、控制器等各環節相互配合。從機械手臂及智慧機器人的發展最容易看出運動控制智慧化的具體成果。
跨接整合 多功能、更彈性
據統計,2018年全球機器人市場規模約128億美元,2023年市場規模逾150億美元。從產業應用面來看,工業機器人操作較為重複、單調及具備參考規範的作業相當成熟,透過重複編程及自動控制,工業機器人可以結合製造主機或生產線,組成單機或多機自動化系統,在無人參與下完成搬運、焊接、裝配、塗料、加工、切割、上下料等作業。隨著全球市場與消費型態的改變,少量多樣化取代大量生產製造,對於產線上變異量較大的組裝/加工作業等,機器人必須提高靈活度及對應能力,才能發揮更好的效用,這也是目前機器人智慧控制的發展重點。
工研院機械所智慧機器人組組長黃甦指出,機器人與機器最大的不同在於多軸控制,比方將感測、驅動、馬達放在機器人的關節內,使用者可以根據不同數目組合關節,客制化機械手臂,如3、4軸模組化關節或雙臂手臂,越多軸控制難度就越高,「二三十年前的機器人用來大量製造,程式寫完後機器人終其一生都在做同一件事,工業4.0少量多樣需求導致傳統機器人不敷使用,可以應付少量多樣生產的智慧機器人成為研發重點。」
當然,越智慧越複雜,以路徑規劃(path planning)、避障(object avoidance)、目標搜索(goal seeking)、軌跡追蹤(trajectory tracking)四大機器人自主行為來說,在自由度少的情況下,技術容易發展,但是當多台機械手臂協同控制時,計算複雜度更高。以多手臂運動控制技術發展為例,想讓多台機器人穩定安全地在產線加工,關鍵技術在path planning及object avoidance,若無效路徑過多或是路徑錯誤,小則影響加工效率,大則可能發生撞機風險。
機器手臂搭配視覺已是相當普遍的應用方式,機器人視覺主要用來做物體辨識及瑕疵檢測。想讓機器人更聰明靈活,符合少量多樣等自動化需求,有賴機器人控制系統控制機器人的工作位置、姿態、軌跡、操作順序及動作時間。機器導入智慧化控制技術已經可以做到跨接與整合不同手臂、產線設備(如CNC加工機台、外部軸)及各類型感測裝置(如視覺、振動等),降低機器人導入產線的門檻,藉由感測設備與軟體的輔助,能夠針對應用需求擴大使用範疇,提升控制性能,讓機器人多工化,有更大的使用彈性。
多軸同步控制在自動化機台、機器人、CNC等已是常見的技術應用,而多軸伺服驅動器不可或缺的關鍵組件則是伺服馬達,目前國際及台灣多軸伺服驅動器逐漸朝更節省空間的技術發展,有助減少控制機構中運動控制所需要的體積,還要具備足夠的模組化機制,才能提高組裝及應用彈性。
善用軟體及加工感測裝置提高機器人智商
以工研院開發的Smart joint智慧型關節模組來說,能整合複雜的機器人多軸運動控制,更具備模組化、雲端服務等其他智慧化附加價值,可以讓用戶自訂機器人臂長及關節數,如此便能克服自由度及工作空間限制,提高產線上的彈性應用,搭配工研院智慧型機器人控制器規劃最佳路徑、避障策略,就能完成多機器人協作或人機協作,在同一個技術架構下因應不同產業需求,自動化產線配置更靈活。在導入工廠端前,只要透過智慧型數位雙生系統(Robotsmith)進行雲端數據整合,即可事先進行規劃與模擬驗證,透過機器人與感測器融合,讓機器人具有智慧行為。

圖2 : smart joint模組化手臂。(source:工研院機械所)
「目前市面上常見的機器人控制多為封閉式系統,在導入產線時只能與同品牌設備串接,產線設備或功能擴充受限。」黃甦指出,國產控制器的高階運動控制技術與歐、日等競爭對手相比,仍有相當的技術差距,使用者若要利用機器手臂做到高階運用,還是需要找到原廠協助,過程費時,「建議開發國產跨平台開放式控制系統及智慧化功能模組,運用軟體與視覺感測裝置以強化機器人控制功能。」以工研院開發的機器人控制器為例,可在Windows/Linux平台上運作,增加ROS節點可串聯ROS,支援跨平台與ROS的優點更能滿足機器人開發者的高階應用。
黃甦指出,工業乙太網路協定所開發的EtherCAT高速網路通訊優點是韌體驅動層級更容易實現機械手臂上的多軸同動控制,也很容易串聯I/O控制模組,「尤其在機械手臂協作與高階應用的發展更為關鍵,能將驅動器微小化,並以系統整合方式將所有零組件(如馬達、HD、驅動器等)整合在一個關節模組中,這是以往運動軸卡沒辦法做到的。」
工研院開發的eMio感測器採用EtherCAT高速網路控制,支援EtherCAT網路國際化通訊標準協定,也具備工業4.0聯網及自我診斷功能,全數位即時網路串聯有助彈性化電控配線。此外,工研院還開發了機器人製造次系統控制器RCC(Robot cell controller),可跨接國內外不同品牌手臂進行多軸控制,結合感測裝置開發高精度加工模組,目前已嘗試將此技術應用在鑽孔、繞切等高精度加工應用。
除了開放式平台架構,eMIO控制器還搭配基礎的機器人運動函式庫,內建無感測器即時碰撞偵測,順應教導與沉浸式力量控制等進階運動控制技術,除了能跨接整合視覺辨識模組,用於工件與設備定位、取放模擬、路徑校正等技術外,更能應用於未來人機協作上,強化人機共工時的安全防護,在醫療手術時,利用沉浸式力量控制可以協助醫師從手臂端獲得精準的力量反擴,掌握手術狀態。智慧擴增模組有助增加各種機器人應用,如手眼協調模組可以增加AI視覺識別的應用,安全觸覺感知模組可以增加人機協作的安全碰撞防護應用,遠端控制模組可以增加人機協作的控制應用方式。
機器視覺市場規模2025年上看130億美元
MarketsadMarkets報告指出,2020年全球機器視覺市場規模為96億美元,2025年將成長至130億美元,複合年增率達6.1%。過去,全球智慧視覺在AOI應用上最廣泛,受疫情影響,勞力密集的工廠缺工嚴重,加速工廠導入機器視覺,也就是機器人與視覺整合,讓機器人擁有真人般的手眼工作能力。
機器視覺與機器人整合控制技術的發展上,以人工智慧視覺應用最廣泛,其中,AI影像辨識相關技術大致可分三類型:影像分類(Image Classification)、物件辨識(Object Detection)及物件分割(Instance Segmentation)。傳統上,視覺系統需要工程師客製化開發物件辨識演算法,如今AI人工智慧可以進行大量資料標註及學習方式,在穩定環境下達到高辨識成功率。
不過,智慧視覺及智慧機器人控制技術在發展過程中仍面臨許多挑戰,黃甦指出,所謂的「智慧」是使機器人具備自主性行為,如學習與決策,人工智慧(AI)在此發揮很大的作用,透過學習新的工廠工件,可以降低過去倚靠視覺工程師客製化開發的必要性,「許多人認為得AI者得天下,其實獲取數據才是關鍵。」人工智慧AI的學習需要餵養多樣性、有效且大量的資料數據,告訴機器人如何判斷、執行,這些技術無法直接套用網路軟體。
技術痛點:資料庫建置難
比方訓練機器人識別小狗可能要提供100萬張狗照片才能實際應用,其他如螺絲、公司產品等物件須歷經同樣的前期工作,但廠商可能生不出五萬或十萬張照片讓機器人辨識。換言之,每讓機器人聰明地執行超過一個指令動作,機器人需要「學習」的功課更多,難度更高,這也是迄今人工智慧發展多年後,智慧機器人在實際工廠中發揮仍有限的原因之一。
為了克服這些問題,工研院開發FOVision人工智慧視覺系統,除了具備智慧3D視覺導引機器人上下料或搬運,更具備人工智慧的自動化工具,可以根據客戶工件自動化生成多樣性資料,自動進行人工智慧的訓練。相較於人工每小時蒐集資料25筆,FOVision系統每小時可蒐集10,000筆資訊,是人工的400倍!這套系統可以模擬各式各樣的狀態照片,如不同光源、角度,產出大量照片供機器人辨識,建立資料庫。目前該系統已導入台灣馬達電機大廠、鞋業、金屬加工與熱處理產業,協助客戶一天內快速換線,調整不同工件,同時符合少量多樣化的生產需求。
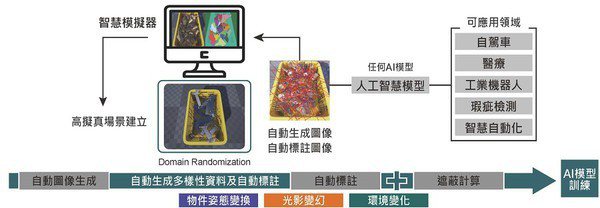
圖3 : FOVision_AI工具架構圖。(source:工研院機械所)
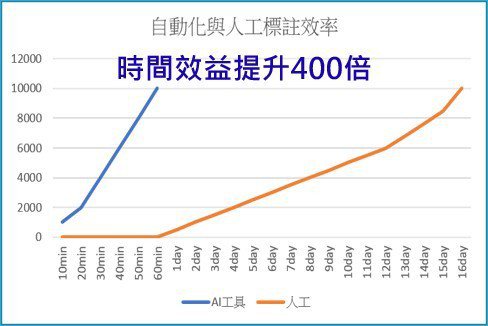
圖4 : 人工與FOVision_AI工具時間效益比較。(source:工研院機械所)
優化升級:模擬與虛實校正
不過,要讓智慧機器人具備如真人般的工作能力,除了控制與感測技術,事前規劃與分析也是關鍵,好比人的大腦在執行動作前會先構思執行方案與步驟,機器人大腦可透過數位雙生系統(即模擬器),將產線數據進行優化分析,透過模擬器驗證測試,之後將可行方案傳達給機器人,比方將優化後的加工路徑導入機器人進行後續執行工作。
資料來源
https://ppt.cc/fFbFEx